Meta Mask
Conntect to you Metamask wallet
When building any system—whether it's a drone, a computer, or an entire project—the quality and compatibility of your components directly impact performance, reliability, and long-term success. The right components ensure everything works seamlessly together, minimizing failures and maximizing efficiency. A well-chosen setup can save you time, money, and frustration, laying a strong foundation for innovation and growth.
Our UAV was powered by two 6S 27,000 mAh solid-state batteries from Dreamfly Innovations, connected in series to form a 12S (44.4 V) system. After testing Li-ion, Li-Po, and LiHV chemistries, we chose solid-state batteries for their reliability, safety, and consistent performance under load. Thrust rig and hover tests confirmed stable discharge behavior and accurate low-voltage cutoffs, while Mission Planner logs validated in-flight voltage stability. This setup gave us approximately 28 minutes of mission endurance and 40 minutes of stable hover time, outperforming all other configurations.
| Battery Type | Capacity | Flight Endurance | Hover Endurance |
|---|---|---|---|
| Li-Po | 30,000 mAh | 22 minutes | 33 minutes |
| Li-Po | 27,000 mAh | 20 minutes | 30 minutes |
| Li-HV | 25,000 mAh | 18 minutes | 25 minutes |
| Solid-State (Dreamfly) | 27,000 mAh | 28 minutes | 40 minutes |
We selected Hobbywing 3011 29-inch carbon-fiber propellers along with the Hobbywing X8 motors, which came with integrated ESCs. This integration helped us save internal frame space, which would otherwise be occupied by traditional external ESCs—particularly important given the compact layout of our center frame. The X8 motor, rated for up to 14S and capable of delivering a maximum thrust of 14.7 kgf (32.4 lbs) per axis as per the datasheet, provided a high thrust-to-weight ratio of 3.8:1 in our configuration. In our thrust rig tests, the motor consistently delivered close to the rated output, confirming the reliability of the datasheet claims in real-world conditions. The propeller-motor combo allowed us to reach speeds of up to 49 mph, ensuring rapid lap coverage for waypoint missions. Thermal performance remained stable even under high-throttle, sustained use. Overall, the X8 and 3011 propeller setup offered an excellent balance of power, efficiency, and integration suited for demanding flight profiles.


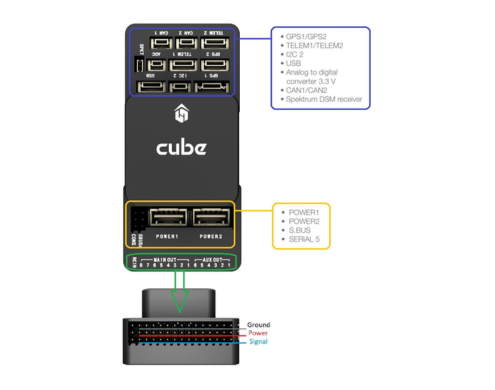
We chose the Pixhawk 2 (Hex Cube Orange+) for its robust sensor redundancy, tight integration with ArduCopter, and reliable performance in autonomous missions. The flight controller’s triple-redundant IMUs and dual barometers allowed us to achieve highly accurate state estimation, which was essential for maintaining precise altitude and stable flight. We conducted extensive FFT analysis using the controller’s gyro data, fine-tuning our notch filters to effectively reduce low-frequency vibrations that could affect flight performance. The clean sensor data enabled us to achieve excellent stability during dynamic flight conditions. Additionally, the Pixhawk’s compatibility with Mission Planner made parameter tuning and real-time telemetry monitoring straightforward, while also providing reliable battery monitoring. All the data we collected, from attitude response to current draw, aligned with our expectations, confirming the Cube Orange+’s consistency and accuracy throughout testing. This controller provided the reliability we needed for our UAV’s performance in demanding flight scenarios.

We selected the RFD900x (900 MHz) radio modem as the primary telemetry link between the Ground Control Station (GCS) and the UAV due to its reliable range of up to 1200 m. This modem ensured stable communication for real-time telemetry, including position, battery voltage, and system status, while also supporting the uplink of mission waypoints and control commands to the flight controller. Initially, we tested the Holybro Sik Telemetry radio but discarded it due to limited range and inconsistent link quality. The RFD900x provided more robust performance, ensuring stable communication even at longer distances, which is critical for mission success.


We chose ExpressLRS (ELRS) as our RC link for communication between the safety pilot and the UAV due to its reliable range of 1500 m, providing responsive and low-latency control. This extended range ensures a stable connection, even when the pilot needs to take manual control at longer distances. We initially tested the X8R receiver, but discarded it because it only achieved a limited range of approximately 1200 m, which didn't offer the reliability required for longer-distance control. After evaluating the performance, we determined that the ELRS receiver, with its superior range and quicker response time, was the best option for maintaining safe and responsive manual overrides, especially during high-altitude and long-range operations.


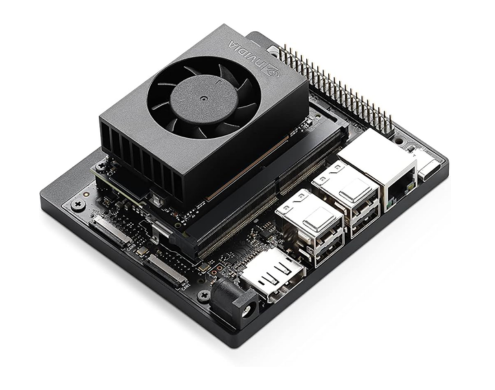
The Jetson Orin Nano is the perfect onboard computing solution for our UAV, offering powerful capabilities for real-time image stitching, object detection, and geotagging. With its integrated GPU and support for CUDA and TensorRT acceleration, the Orin Nano significantly reduces inference times by 700ms compared to its predecessor, the Jetson Nano. This performance boost allows the UAV to autonomously execute mission-critical tasks such as detecting targets, generating high-quality maps, and performing precise payload drops during flight, all in real time. Its ability to process complex data efficiently ensures rapid decision-making without relying on external systems, making it ideal for tasks like mapping large areas, tracking objects, and geotagging images with pinpoint accuracy. The Jetson Orin Nano combines powerful processing, low-latency performance, and adaptability, making it an essential component for advanced UAV operations.

The Arducam IMX477 is a 12.3MP camera module equipped with a 16mm focal length lens, selected for its narrower field of view (FOV) that minimizes distortion and enhances image detail. When mounted on the UAV at an altitude of 150 feet, it captures high-resolution 4K images with a ground footprint of approximately 17×13 meters. This setup offers an optimal balance between resolution and area coverage, making it ideal for precision object detection and aerial mapping tasks. Image capture is triggered at a rate of 1 frame per second, minimizing overlap and reducing processing load on the Jetson Orin Nano, while still ensuring sufficient coverage for stitching and analysis. To further enhance image clarity, a custom-designed dampening system is integrated to reduce vibrations during flight, resulting in sharper and more reliable image data.
To enable long-range, high-speed wireless communication between the UAV and the Ground Control Station (GCS), a robust 5GHz link is established using the Ubiquiti Bullet M5 and PowerBeam M5. This setup ensures a stable connection for transmitting mission-critical data processing outputs from the onboard Jetson Orin Nano. The PowerBeam M5, mounted at the GCS, offers high-gain directional coverage, while the Bullet M5 onboard the UAV provides compact, weather-resistant connectivity without adding significant weight. Operating in the 5GHz band reduces interference and improves throughput, making it suitable for real-time data exchange during dynamic UAV missions. This reliable wireless bridge plays a crucial role in extending operational range and maintaining seamless communication throughout the flight.


Select what network and wallet you want to connect below